หุ่นยนต์เคลื่อนที่อัตโนมัติคืออะไร
คลังสินค้า บริษัทโลจิสติกส์ ธุรกิจการเกษตร และสถาบันด้านการดูแลสุขภาพต่างมองหาวิธีการใหม่ๆ ที่เป็นนวัตกรรมเพื่อปรับปรุงประสิทธิภาพการดำเนินงาน เพิ่มความเร็ว รับประกันความแม่นยำ และเพิ่มความปลอดภัย หลายบริษัทกำลังหันไปใช้หุ่นยนต์เคลื่อนที่อัตโนมัติ (AMR)
หุ่นยนต์เคลื่อนที่อัตโนมัติเป็นหุ่นยนต์ประเภทหนึ่งที่สามารถเข้าใจและเคลื่อนที่ผ่านสภาพแวดล้อมได้อย่างอิสระ AMR แตกต่างจากยานพาหนะนำทางอัตโนมัติ (AGV) รุ่นก่อน ซึ่งต้องพึ่งพาเส้นทางหรือเส้นทางที่กำหนดไว้ล่วงหน้า และมักต้องมีการควบคุมดูแลของผู้ปฏิบัติงาน
AMR ใช้ชุดเซ็นเซอร์ที่ซับซ้อน ปัญญาประดิษฐ์ การเรียนรู้ของเครื่อง และการคำนวณสำหรับการวางแผนเส้นทางเพื่อตีความและนำทางผ่านสภาพแวดล้อม โดยไม่ต้องเชื่อมต่อด้วยสายกับแหล่งพลังงาน เนื่องจาก AMR ติดตั้งกล้องและเซ็นเซอร์ หากพวกเขาพบกับสิ่งกีดขวางที่ไม่คาดคิดขณะนำทางในสภาพแวดล้อม เช่น กล่องที่หล่นลงมาหรือฝูงชน พวกเขาจะใช้เทคนิคการนำทาง เช่น การหลีกเลี่ยงการชน เพื่อชะลอ หยุด หรือเปลี่ยนเส้นทางของพวกเขาไปรอบๆ วัตถุนั้น แล้วทำงานต่อไป
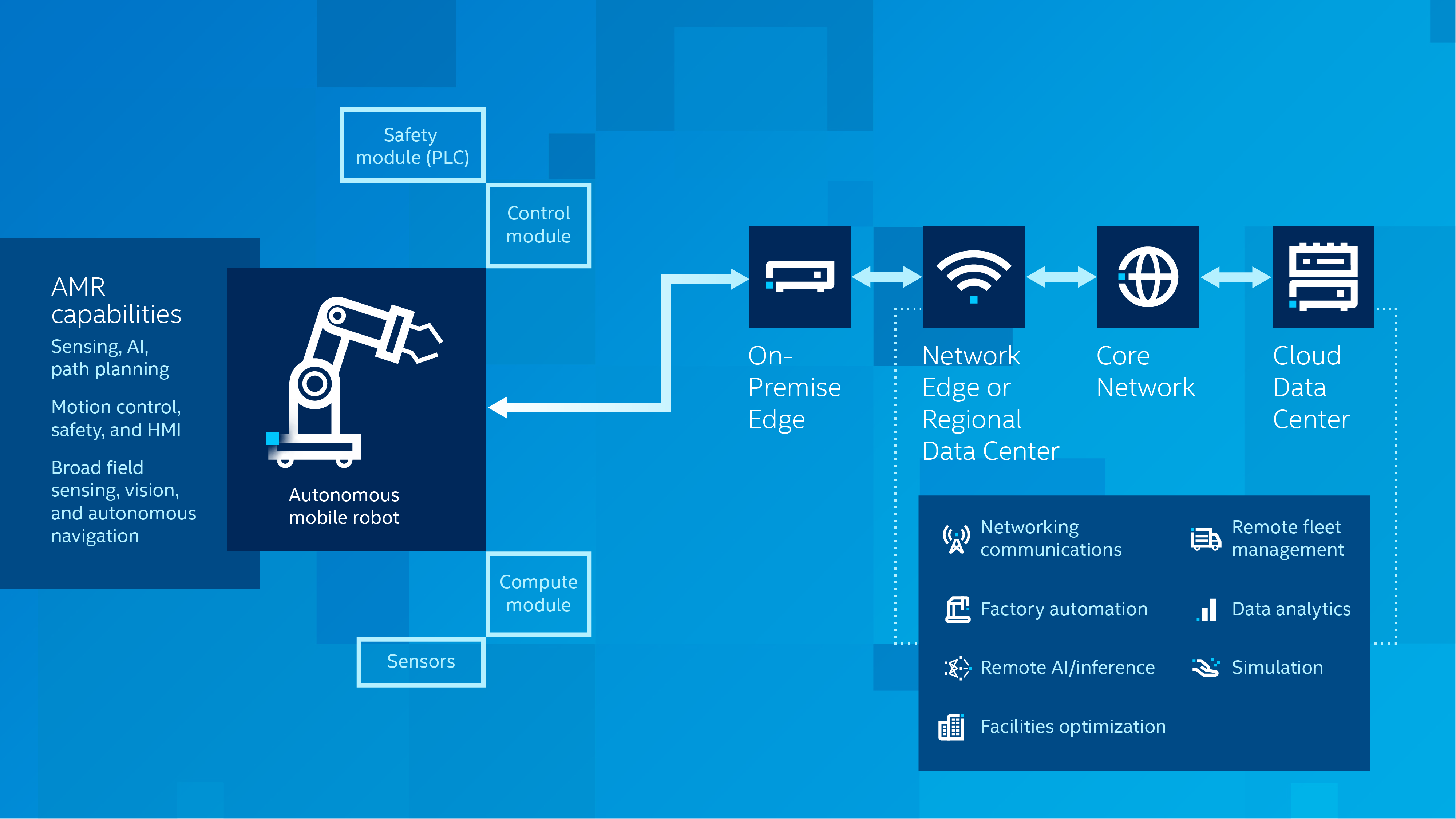
ส่วนประกอบและสถาปัตยกรรมหุ่นยนต์เคลื่อนที่อัตโนมัติ
สำรวจแผนภาพด้านล่างเพื่อเรียนรู้ว่าส่วนประกอบของระบบทำงานร่วมกันอย่างไรเพื่อเปิดใช้งาน AMR
{kind=link}
ทำไมจึงควรปรับใช้หุ่นยนต์เคลื่อนที่อัตโนมัติ
ความปลอดภัยสำหรับคนงานมากขึ้น
ธุรกิจมากมายใช้ AMR สำหรับงานที่อาจเป็นอันตรายหรือเป็นไปไม่ได้สำหรับพนักงานที่เป็นคน ตัวอย่างเช่น อาจมีการใช้ AMR เพื่อทำความสะอาดและฆ่าเชื้อพื้นที่ต่างๆ เพื่อสุขภาพและความปลอดภัยที่ดีขึ้น ขนส่งตัวอย่างติดเชื้อจากห้องปฏิบัติในโรงพยาบาล บรรทุกของหนักในสภาพแวดล้อมทางอุตสาหกรรม หรือทำงานในสภาวะที่รุนแรง ซึ่งมนุษย์ไม่สามารถและไม่ควรทำงาน
ความยืดหยุ่นมากขึ้น
AMR ประเมินและตอบสนองต่อสภาพแวดล้อมแบบไดนามิกในขณะที่ทำงานต่างๆ สำเร็จ ทั้งหมดโดยไม่มีผู้ปฏิบัติงานควบคุมดูแลโดยตรง โซลูชันการระบุตำแหน่งและการทำแผนที่ (SLAM) พร้อมกันและเทคโนโลยีการทำแผนที่ขั้นสูงช่วยให้ AMR สามารถเข้าใจและปรับให้เข้ากับการเปลี่ยนแปลงในสภาพแวดล้อมของตน ความยืดหยุ่นนี้ทำให้หุ่นยนต์เป็นเครื่องมือทรงคุณค่าที่นำไปใช้ในแอปพลิเคชันและอุตสาหกรรมต่างๆ ได้
ประสิทธิภาพและความสามารถในการผลิตที่เพิ่มขึ้น
เพื่อให้พนักงานมุ่งเน้นไปที่กิจกรรมที่มีมูลค่าสูง เช่น การสนับสนุนลูกค้า ธุรกิจมักจะใช้ AMR เพื่อช่วยด้านการค้นหา หยิบจับ และเคลื่อนย้ายสินค้าคงคลัง เมื่อประสิทธิภาพการทำงานเป็นสิ่งสำคัญ ธุรกิจจำนวนมากหันมาใช้ AMR ที่ใช้พลังงานต่ำ ซึ่งใช้พลังงานในการทำงานน้อยลง พลังงานในการทำงานน้อยลงหมายถึง AMR สามารถชาร์จและกลับไปทำงานได้เร็วขึ้น ลดการหยุดทำงาน และช่วยให้การผลิตและการปฏิบัติตามข้อกำหนดดำเนินต่อไปได้
AMR ในการดำเนินงาน
ค้นพบวิธีที่บริษัทที่มีความคิดก้าวหน้านำ AMR มาใช้ในธุรกิจของตนและเรียนรู้เกี่ยวกับผลประโยชน์ที่เปลี่ยนแปลงธุรกิจที่พวกเขาได้รับ
เพิ่มประสิทธิภาพการดำเนินงานด้วยการเร่งการพัฒนาและการปรับใช้ AMR
เรียนรู้ว่า UP Squared RoboMaker Pro Kit ของ AAEON ทำให้การพัฒนาและการปรับใช้ AMR เร็วขึ้นและง่ายขึ้นอย่างไร ด้วยส่วนประกอบฮาร์ดแวร์และซอฟต์แวร์ที่ผสานรวมและได้รับการตรวจสอบล่วงหน้าทั้งหมดที่คุณต้องมี รวมถึงกล้อง Intel® RealSense™ สำหรับการมองเห็น 3 มิติและแม้แต่มอเตอร์และล้อ ทั้งหมดในกล่องเดียว
ช่วยเหลือโรงพยาบาลด้วยการฆ่าเชื้อที่รวดเร็วและมีประสิทธิภาพมากขึ้น
ค้นหาว่า Akara สตาร์ทอัพสัญชาติไอริชใช้เทคโนโลยี Intel® เพื่อขับเคลื่อนหุ่นยนต์เคลื่อนที่อัตโนมัติอัจฉริยะและฆ่าเชื้อโรคได้อย่างไร
การปรับปรุงประสบการณ์ลูกค้าด้วยโซลูชันการจัดส่งผ่านมือถือ
ค้นพบวิธีที่เทคโนโลยีการตรวจจับเชิงลึก Intel® RealSense™ นำทางหุ่นยนต์ Aethon ให้ส่งสินค้าโดยอัตโนมัติเพื่อทำให้ประสบการณ์ของผู้ใช้บริการน่าจดจำยิ่งขึ้น ตั้งแต่บริการรูมเซอร์วิส อาหาร อุปกรณ์จัดเลี้ยง ไปจนถึงผ้าปูที่นอน
แอปพลิเคชันอุตสาหกรรมสำหรับ AMR
การผลิต คลังสินค้า และโลจิสติกส์
หุ่นยนต์เคลื่อนที่อัตโนมัติกำลังกลายเป็นส่วนสำคัญของธุรกิจการผลิต คลังสินค้า และโลจิสติกส์อย่างรวดเร็ว เนื่องจากมีความสามารถรอบด้านและง่ายต่อการรวมเข้ากับโครงสร้างพื้นฐานที่มีอยู่ สามารถใช้ในการทำงานหนักและงานเบา ส่งสินค้าให้กับพนักงานที่เป็นมนุษย์ และดำเนินการตรวจสอบความปลอดภัยและการรักษาความปลอดภัย
การดูแลสุขภาพ
ผู้ให้บริการด้านการดูแลสุขภาพพึ่งพา AMRสำหรับความต้องการที่สำคัญ เช่น การฆ่าเชื้อ การแสดงตนทางไกล และการจัดส่งยาและเวชภัณฑ์ สร้างสภาพแวดล้อมที่ปลอดภัยสำหรับทุกคน ขณะเดียวกันก็ทำให้พนักงานมีเวลาร่วมกับผู้ป่วยมากขึ้น
ร้านค้าปลีก ธนาคาร และอุตสาหกรรมบริการ
ผู้ค้าปลีก ธนาคาร และบริษัทด้านการบริการใช้ AMR เพื่อเสริมสร้างและปรับปรุงประสบการณ์ของลูกค้า ตั้งแต่การบริการลูกค้าไปจนถึงระบบอัตโนมัติของสินค้าคงคลัง รูมเซอร์วิส การให้ความช่วยเหลือด้านสัมภาระ และการค้นหาเส้นทาง
เมืองอัจฉริยะและภาครัฐ
เมืองแห่งนวัตกรรมและหน่วยงานภาครัฐทั่วโลกกำลังใช้ประโยชน์จาก AMR ทั้งหมดที่มีให้ เมืองอัจฉริยะกำลังใช้ประโยชน์จากหุ่นยนต์เพื่อปรับปรุงบริการที่อยู่อาศัย เช่น การกำจัดขยะหรือการขนส่งสาธารณะ และหน่วยงานสาธารณะกำลังใช้ AMR เพื่อความปลอดภัย การรักษาความปลอดภัย ภารกิจค้นหาและกู้ภัย และการสำรวจอวกาศ
เกษตรกรรม
เพื่อให้ทันกับการเติบโตของประชากรที่คาดการณ์ไว้ภายในปี 2050 โลกจะต้องผลิตอาหารมากกว่าที่เป็นอยู่ในปัจจุบันถึง 50 เปอร์เซ็นต์.1 เพื่อให้ทำได้ บริษัทเกษตรกรรมกำลังใช้ AMR เพื่อลดการขาดแคลนแรงงานจำนวนมาก เพิ่มความสามารถในการผลิต และปรับปรุงผลผลิต
การสนับสนุนที่ AMR ที่ Edge
Intel นำเสนอเทคโนโลยีและโซลูชันการประมวลผลที่พร้อมใช้งานที่ Edge, การเชื่อมต่อ, เรียลไทม์, ความสามารถในการจัดการ, การรักษาความปลอดภัย, AI, และการจัดเก็บข้อมูลและโซลูชันที่คุณต้องมีเพื่อให้ AMR ของคุณพร้อมใช้งานและทำงานได้อย่างราบรื่นในโรงงาน ฟาร์ม หรือทุกที่ที่คุณเลือกปรับใช้
Edge Insights สำหรับ AMR
ดูว่าคุณสามารถพัฒนา สร้าง และปรับใช้แอปพลิเคชันหุ่นยนต์เคลื่อนที่แบบครบวงจรอย่างง่ายดาย ด้วยการพัฒนาซอฟต์แวร์แบบโมดูลาร์ที่สร้างขึ้นตามวัตถุประสงค์ของเราได้อย่างไร
ผลิตภัณฑ์ Intel® RealSense™
ค้นพบกลุ่มกล้องเชิงลึกที่แข็งแกร่ง ซึ่งช่วยให้ AMR สามารถรับรู้และปรับให้เข้ากับสภาพแวดล้อม ซึ่งเปิดใช้งานความสามารถต่างๆ เช่น การหลีกเลี่ยงการชน และการทำแผนที่การเข้าใช้
ฮับซอฟต์แวร์ Intel® Edge
รับสิทธิ์เข้าถึงแพ็คเกจซอฟต์แวร์ที่พร้อมปรับใช้และปรับแต่งได้ ฟรี การใช้งานอ้างอิง ตลอดจนทรัพยากรและเครื่องมือมากมายที่ออกแบบมาเพื่อช่วยคุณเร่งการพัฒนาและปรับใช้โซลูชันการประมวลผลที่ Edge
Intel® DevCloud สำหรับ Edge
ทดสอบฮาร์ดแวร์ Intel® ก่อนตัดสินใจซื้อ แซนด์บ็อกซ์ออนไลน์นี้ประกอบด้วยชุดเครื่องมือ Intel® Distribution of OpenVINO™, Intel® Deep Learning Workbench และ CPU, GPU, VPU และ FPGA ล่าสุดของเรา
ผู้แทนจำหน่ายชุดเครื่องมือ OpenVINO™ ของ Intel®
เข้าถึงเครื่องมือที่จำเป็นและส่วนประกอบที่สร้างไว้ล่วงหน้าเพื่อปรับปรุงการพัฒนาความสามารถในการอนุมาน AI สำหรับ AMR
คุณกำลังสร้างโซลูชันหุ่นยนต์อยู่ใช่ไหม
ลองดูแคตตาล็อกข้อเสนอของพาร์ทเนอร์ที่เพิ่มขึ้นเรื่อยๆ เพื่อสร้างโซลูชันแบบครบวงจร เรามีข้อเสนอที่รวมถึงชุดพัฒนาหุ่นยนต์ ซอฟต์แวร์ และส่วนประกอบฮาร์ดแวร์ตั้งแต่หุ่นยนต์ไปจนถึง Edge และคลาวด์
คำถามที่ถูกถามบ่อย
หุ่นยนต์เคลื่อนที่อัตโนมัติ (AMR) เป็นหุ่นยนต์ประเภทหนึ่งที่สามารถเข้าใจและเคลื่อนที่ผ่านสภาพแวดล้อมได้โดยไม่ได้รับการดูแลโดยตรงจากผู้ปฏิบัติงาน หรือจำกัดอยู่ในเส้นทางที่กำหนดไว้ล่วงหน้า AMR ทั้งหมดเริ่มต้นด้วยแพลตฟอร์มโมบายล์ และ AMR มากมายมาพร้อมกับไฟล์แนบหรือเครื่องมือแก้ไขแบบพาสซีฟหรือแบบแอคทีฟเพื่อให้งานประเภทต่างๆ สำเร็จ AMR แบบล้อ อิสระจากพลังงานและข้อมูลแบบมีสาย นำทางโดยใช้กล้อง เซ็นเซอร์ ปัญญาประดิษฐ์ และวิสัยทัศน์ของเครื่องจักร
ตัวอย่างหนึ่งของหุ่นยนต์เคลื่อนที่อัตโนมัติคือ AMR ที่หยิบและวาง ซึ่งมักใช้ในคลังสินค้า AMR นี้ใช้เทคโนโลยีวิสัยทัศน์ของเครื่องจักรเพื่อระบุ หยิบ และเคลื่อนย้ายวัตถุจากที่หนึ่งไปยังอีกที่หนึ่งในขณะที่หลีกเลี่ยงอุปสรรค อีกตัวอย่างหนึ่งของ AMR คือการขนส่งยาหรือเวชภัณฑ์ในโรงพยาบาล AMR นี้ช่วยให้การจ่ายยาเป็นแบบอัตโนมัติโดยมอบหมายงาน หยิบและจัดส่งยาให้กับผู้ป่วยที่ถูกต้องทั่วทั้งโรงพยาบาล
หุ่นยนต์เคลื่อนที่อัตโนมัติ (AMR) ใช้กล้อง เซ็นเซอร์ ปัญญาประดิษฐ์ และวิสัยทัศน์ของเครื่องจักร เพื่อนำทางผ่านสภาพแวดล้อมที่ไม่มีการควบคุมอย่างอิสระเพื่อทำงานต่างๆ ให้สำเร็จ ยานพาหนะนำทางอัตโนมัติ (AGV) จะวิ่งตามทางหรือเส้นทางที่กำหนดไว้ล่วงหน้า เพื่อทำงานซ้ำๆ โดยอัตโนมัติ และมักจะได้รับการดูแลโดยผู้ปฏิบัติงานที่เป็นมนุษย์ ยานพาหนะใต้น้ำที่ควบคุมจากระยะไกล (ROV) ถูกนำมาใช้เพื่อทำงานใต้น้ำลึกให้สำเร็จ ในขณะที่ถูกล่ามและควบคุมโดยลูกเรือที่ตั้งอยู่บนแท่นลอยน้ำหรือบนบก ROV สามารถติดตั้งอุปกรณ์ต่างๆ เช่น แขนหุ่นยนต์ กล้อง ไฟ หรือเซ็นเซอร์ เพื่อเพิ่มขีดความสามารถ